自動運転(ドライバー無人での、いわゆるレベル4以上)の運行事業では、安全のため、遠隔に設置されたコントロールセンターで、車両の自動走行状態を常に監視すること、また、車両の周辺状況(映像と音声)及び乗客など車内の状況(映像と音声)を必要なときに直ちに確認できることが求められます。
さらに、車両の自動運転機能のみでは公道での運行の判断が難しい状況(例えば、歩行者の横断判断、駐車車両を追い越す判断など)がしばしば生ずるため、事業運営上、コントロールセンターからの遠隔運転操作によって、走行を継続できることが望まれています。
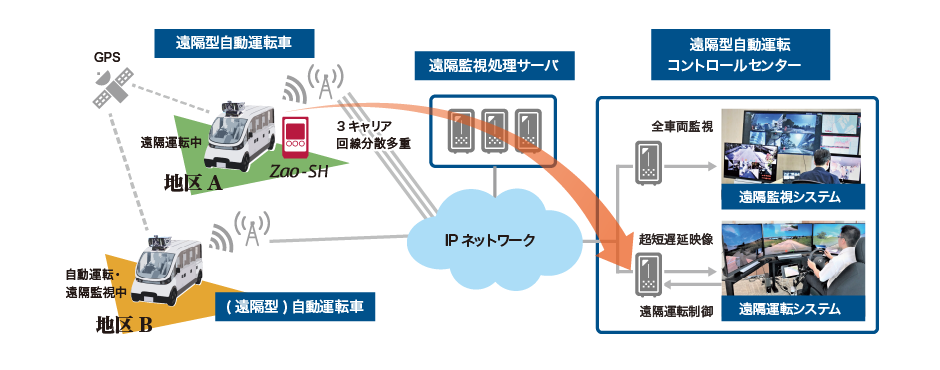
ソリトンが提供する遠隔型自動運転コントロールセンターは、複数地区、複数台の自動運転車(運転者無人)を低コストで常時または必要時に監視するとともに、遠隔操作が必要となった車両について、遠隔運転を可能とします。
ソリトンシスの遠隔監視システムは、クラウド基盤を中心に車両と遠隔センターをシームレスにつなぎます。複数車両の同時監視を複数拠点(m:n)が可能で、事業効率化を実現しています。また、運行システムや他システムとの車両連携することで、自動運転サービスを高度化することが可能です。
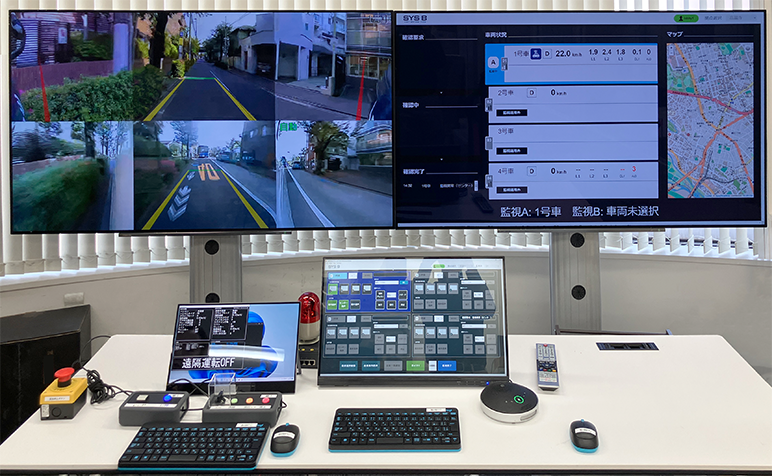
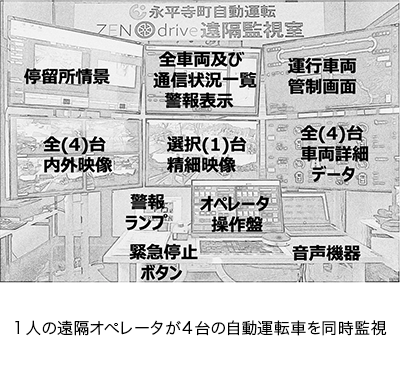
車両走行状態一覧表示のほか、複数車両の映像表示や1車両選択拡大表示など、機能別にモニタを配置します。




生活道路における路上駐車など、自動運転が走行判断に迷う局面で、遠隔オペレータが判断をアシスト、遠隔ボタン操作でオペレータ判断を車両に伝えます。自動運転車の切れ目のない無人走行が可能になります。
遠隔運転ではありませんので、センターに遠隔運転装置(コクピット)は不要です。

バス区間(公道)において乗客を乗せた小型バスを
ドライバー無人で遠隔運転します。
 コンパクト型(1画面)
コンパクト型(1画面)
 コンパクト型(1画面)
コンパクト型(1画面)
 臨場型(3画面)
臨場型(3画面)
 臨場型(3画面)
臨場型(3画面)