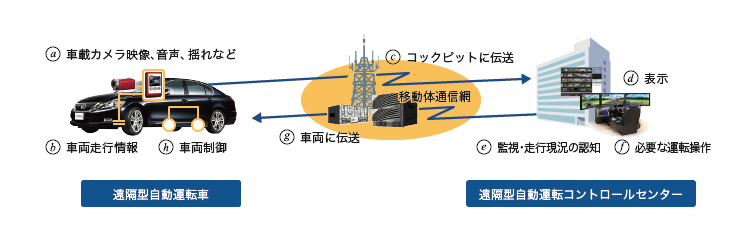
自動車の自動運転システムで、緊急時等に備えて自動車から遠隔に存在する監視・操作者が
電気通信技術を利用して当該自動車の運転操作を行うことができるもの

名古屋のテストコースの遠隔運転車両(乗用車タイプ)を、
東京の遠隔センターから遠隔で運転します。

バス区間(公道)において乗客を乗せた小型バスを
ドライバー無人で遠隔運転します。

中部国際空港(制限区域)内において、無人のトーイングトラクター車が2台の貨物車を遠隔運転で牽引、旅客機への横付けを行います。

生活道路における路上駐車など、自動運転が走行判断に迷う局面で、遠隔オペレータが判断をアシスト、遠隔ボタン操作でオペレータ判断を車両に伝えます。自動運転車の切れ目のない無人走行が可能になります。
遠隔運転ではありませんので、センターに遠隔運転装置(コクピット)は不要です。
自動運転(ドライバー無人での、いわゆるレベル4以上)の運行事業では、安全のため、車両の走行状態を常時監視し、また、車両の周辺状況、車内の状況を必要なときに直ちに確認できることが求められます。
さらに、自動運転機能のみでは運行の判断が難しい状況が生ずるため、コントロールセンターからの遠隔運転操作によって、走行を継続できることが望まれています。