2018年11月06日
超短遅延映像による自動運転車向け遠隔運転システムを開発
株式会社ソリトンシステムズ(本社:東京都新宿区、代表取締役社長:鎌田信夫、以下ソリトン)は、自動運転車輌を対象に、 ドライバーが遠隔から安全に運転操作できるリモート運転システムについて開発を進めています。
このほど開催されたインターネットITS協議会(会長:藤江一正)の定期イベントにおいて、 東京の会場からリモート操作により名古屋地区(私有地)の自動車を実用スピードで遠隔運転するデモンストレーションを実施しました。
デモンストレーションシステムでは、ソリトンが開発したGlass to Glassでの遅延時間※1を最小40ミリ秒台まで短縮可能な超短遅延技術を適用、 また、運転視界内の死角を除去する画像処理、自動車の揺れの伝達などの諸方式を組み込み、実用的な自動車走行スピードで安全なリモート運転操作が可能であることを実証しました。
【遠隔型自動運転システム、及びその基幹技術について】
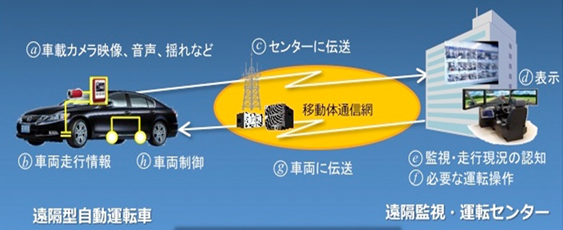
自動運転車輌の走行に当たっては、人間の操作を一切必要としないいわゆる完全自動運転(SAEレベル5)※2が実現されるまでは、 安全を考慮しドライバーが運転席に同乗するか、あるいは所定の要件のもと、自動車から遠隔に存在するドライバーが通信技術を利用してその走行を監視し、 必要に応じて運転操作を行うこと(「遠隔型自動運転システム」という)が必要とされます※3。
従って遠隔型自動運転システムには、所定の安全要件を具備したコネクテッドカーシステムとしての高い信頼性と強固なセキュリティが求められます。
とりわけモバイル回線を用いた自動車の前方・周辺映像の遠隔ドライバーへの通信に関しては、 走行中の自動車の現在位置と遠隔ドライバーがモニターで視認する位置とのズレを極力抑えるための超短遅延映像伝送、 及び走行に伴うモバイル回線の激しい帯域変動に対処しうる安定した映像の表示、の二つの技術が安全かつ実用的な遠隔走行実現のための根幹となります。
ソリトンでは、モバイル回線向けに開発した独自の映像伝送プロトコルRASCOWTMにより、後者、映像安定化の機能は既に商用に供しています。 また前者については、今回RASCOWTMをベースに映像伝送プロセス全体の最適化を図ることにより、40ミリ秒台という大幅な遅延短縮化を実現しました。
完全自動運転の実現までは、今後相当の時間を要するものと思われます。 その間、遠隔運転は自動運転とのコラボレーションにより、今後のドライバー不足への対処、運転代行業への適用、 さらにはMaaS※4への展開など、各方面で大きくニーズが広がるものと想定されます。
ソリトンは、これらの動向を踏まえ、自動運転技術と組み合わせたAI技術の活用をも考慮して、遠隔運転システムの一層の安全性と効率化を目指し開発を推進する計画です。

- ※1「Glass to Glassでの遅延時間」とは、映像がカメラのレンズに入ってから表示装置のモニターに映し出されるまでにかかる時間を指します。なお、40ミリ秒台にはモバイル回線の遅延時間を含んでいません。
- ※2「自動運転(SAEレベル5)」とは、米国自動車技術会(SAE)が定義した6段階の自動運転レベルのうち最高のレベル(完全自動運転)。すなわち、運転手を必要とせず、走行エリアも限定されずにどんな場所の道路でも自動運転で走行が可能な状態を表します。
- ※3「遠隔型自動運転システム」の定義及びその適用に関する日本の公制度は以下。
「遠隔型自動運転システムの公道実証実験に係る道路使用許可の申請に対する取扱いの基準」警察庁 (平成29年6月)
「遠隔型自動運転システムを搭載した自動車の基準緩和認定制度」 国土交通省 (平成30年3月) - ※4「MaaS」とは、Mobility as a Serviceの略称で、カーシェアやライドシェアの概念を拡張し、例えば、自動車並びに鉄道、バスなど複数の交通サービスを利用者の目的地まで結びつけ、オンデマンドで利用できる単一のモビリティサービスに統合すること、などを意味します。
【 遠隔型自動運転システムに関する問合せ先 】 遠隔運転プロジェクト remote-proj@list.soliton.co.jp