2020年08月07日
ソリトン、静岡県主催の自動運転プロジェクトに参画
株式会社ソリトンシステムズ(代表取締役社長:鎌田信夫、以下ソリトン)は、この度、静岡県が運営する自動運転実証実験事業「しずおか自動運転ShowCASEプロジェクト」(注1)の連携企業として、下田市の公道で実施予定の実証実験に参加します。
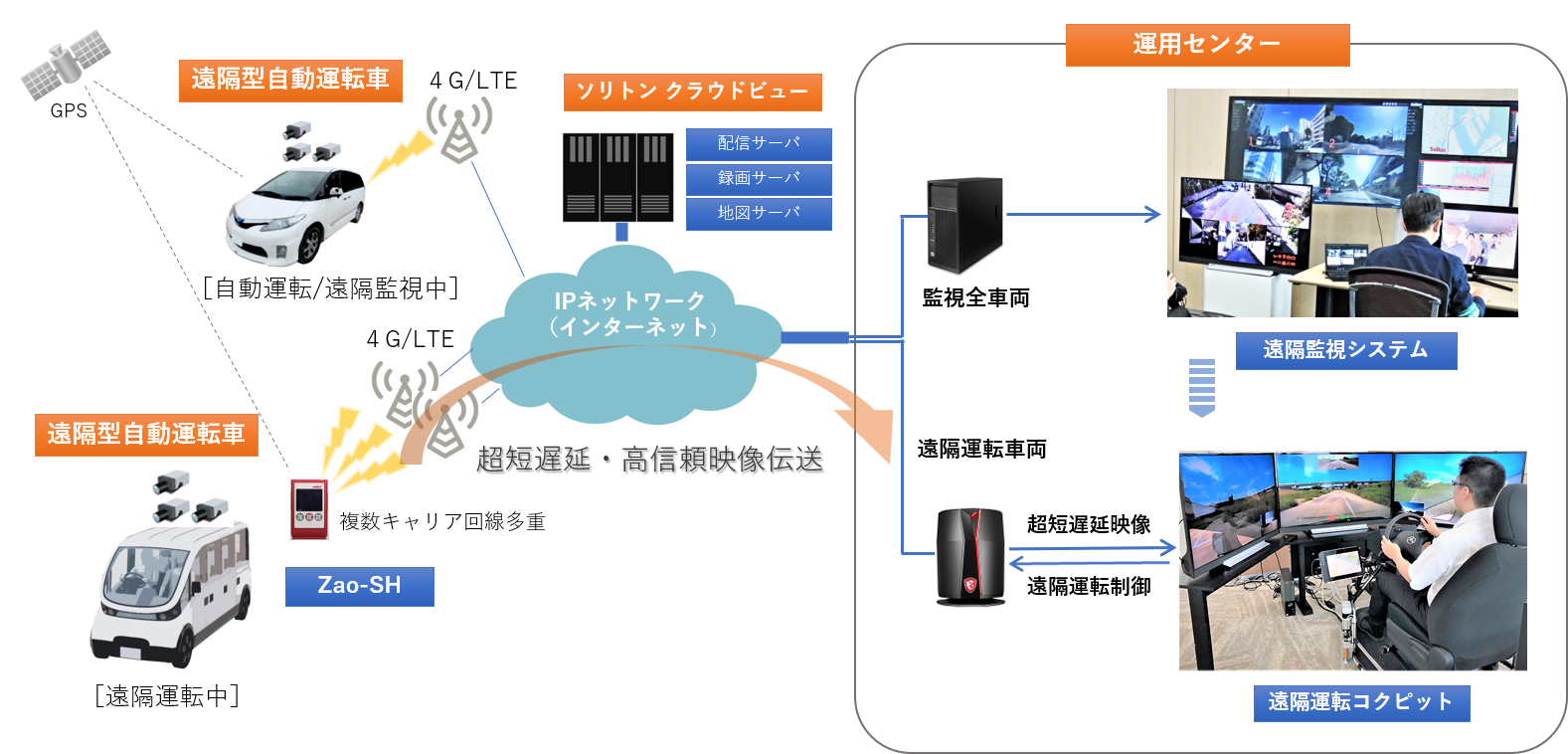
この実証実験で、ソリトンは、下田市内を自動運転する小型バスの走行状況、車内状況を、市外に別途設置された運用センターから監視し、またその小型バスを同センターから遠隔で運転制御できるシステムを提供します。
現在、各地で実証中の自動運転では、路上駐車の追い抜き判断、歩行者の車道横断振る舞いの判断など、システムのみでは情況判断が難しいケースが多く発生し、また、システムの制御能力自身を超える事象が生ずることもあります。このため、現行の自動運転走行ではドライバーが運転席で常時待機するよう義務付けられています。
ソリトンが開発を進めてきた遠隔監視・運転システムは、この課題の解決を狙い、通信によって車外から同時に複数台の自動運転車の走行状況等を監視把握し、人間の操作が必要となった自動車には、運転操作を車外の運転手が遠隔から行うものです。ドライバーの無人化を早期に実現できる方式として、今、この遠隔システムへの期待が高まっています。
ソリトンによる下田市における実証実験では、本年中に、運用センターを市外に設置し、ここから複数台の自動車の走行状況、車内情況を監視するとともに、センターから車外歩行者、対向・後続車向けに拡声、情報表示を行い、また車内乗客との通話を可能とします。
さらに、遠隔運転システムにはソリトン製品である映像デジタル処理時間40ミリ秒を実現した超短遅延映像伝送装置Smart-telecaster Zao-SH(注2)を組み込みます。これにより、標準のモバイル回線(LTE)適用の下でも車両~センター間トータルの映像遅延時間が大幅に短縮され、あわせてこれらの回線を複数の通信事業者間で同時多重することにより、センターからの遠隔運転の安全性を飛躍的に高めます。
ソリトンは、超短遅延映像伝送装置Smart-telecaster Zao-SHをベースに、サイバーセキュリティ対策、信頼性対策を施した遠隔操縦、遠隔制御システムの開発を行っています。
その最も有力な分野である遠隔運転では、公道のみならず、空港、工場構内、工事現場、農地などのいわゆる閉域領域における遠隔運転ニーズが特に高まっており、これまでの公道走行車両に加えて、各種自動車、建機、農機などへ遠隔運転の適用を一層推進していきます。
(注1) 「しずおか自動運転ShowCASEプロジェクト」
静岡県が主導し、産学官合同で進める自動運転を中心とした社会実験プロジェクト。
2018年から2024年までの期間を予定。下田市を含む静岡県4地域での実証実験が計画されている。現在、参加の連携企業・大学はソリトンを含め13社・2大学。
本プロジェクトの目的は以下。
- 自動運転等の最新技術を活用した移動サービスの導入による地域交通の課題解決の検証。
(運転手不足、過疎地域等高齢者への移動支援、公共交通ICT可等への対応) - EV等、次世代自動車及び自動運転車両の研究による静岡県内企業の技術開発を促進。
- 製品ページ: https://www.soliton.co.jp/lp/zao-sh/
(注2) 超短遅延映像伝送装置「Smart-telecaster Zao-SH」
モバイル回線を使って高品質な映像をリアルタイムに安定伝送する「Smart-telecasterシリーズ」の最新モデルであるZao-SHは、独自のH.265エンコーダと伝送プロトコル"RASCOW2"を搭載することで超短遅延伝送が可能です。 映像と音声に加えて制御信号の伝送もサポートしており、より安全な遠隔運転の実現に寄与します。
*遠隔運転システムにより、東京設置のコクピットから名古屋地区の自動車を遠隔運転する実車映像はこちら
【 Smart-telecaster Zao-SHに関する問合せ先 】
映像コミュニケーション事業部 Tel: 03-5360-3860 stc-sales@list.soliton.co.jp