2024年12月17日
ソリトンと名古屋大学、自動運転を遠隔から簡易な操作で走行支援できる遠隔型自動運転「遠隔アシスト」を開発
~日本初の公道実証、自動運転では対応困難な走行を遠隔からのボタン操作で運行継続~
株式会社ソリトンシステムズ(代表取締役社長:鎌田理、以下「ソリトン」)と、国立大学法人東海国立大学機構 名古屋大学未来社会創造機構(機構長:佐宗章弘、以下「名古屋大学」)及び同大学発ベンチャー、株式会社エクセイド(代表取締役社長:伊藤勝規、以下「エクセイド」)は協同で、自動運転の走行を、遠隔の監視・操作者がボタン操作等の簡易な操作によっても補完、支援できる新しい遠隔型自動運転システム(注1)を開発しました(以下、この簡易な操作による遠隔からの自動走行支援の仕組みを、「遠隔アシスト」と記述します)。
これにより、自動運転での対応が難しい例えば生活道路での路上駐車車両の迂回など、多様な対処が必要となる特徴的な走行ケースに対して、運行の継続が容易になります。
遠隔アシストを用いた日本初となる実証実験は、愛知県春日井市高蔵寺ニュータウンの公道で12月17日から開始します。これは、住宅街における自動運転サービスの高度化に関する研究開発「知の拠点あいち重点研究プロジェクトD9」の一環で実施するものです。
自動運転システム「ADENU」(注2)搭載の電動カート車の自動走行を、豊田市内に設置した遠隔センターから、遠隔監視・操作者が遠隔アシストを組み込んだ遠隔型自動運転システムにより支援します。
現在、全国各地でドライバーの無人化を目指して公道での自動運転の実証実験が行われていますが、緊急時、あるいは自動運転システムでの対応が困難な走行局面に備えて、ドライバーが運転席に乗車することが必要です(自動運転レベル2)。
特に後者の場合には、同乗ドライバーの操作の代わりに遠隔に存する監視・操作者が自動運転車を制御する遠隔型自動運転システムの利用が事業効率化の観点から有効ですが、これまでの遠隔システムでは、その多くがあらゆる走行ユースケースへの対処を指向したいわゆる遠隔運転方式であったため、自動運転車が実際に当該ケースに遭遇したとき、対応の即応性を欠くという課題がありました。
このため、遠隔アシストでは、自動運転システムと遠隔システム間の情報連携を含む連結性を高め、上述した走行局面での即応性を確保するとともに、下記のように、運転操作は遠隔監視・操作者の監視のもと、自動運転システムを一部活用することで、遠隔監視・操作者による操作を大幅に簡易化します。
具体的には、運行中の自動運転車がシステム対応できず自ら支援を要求した場合、遠隔の監視・操作者は、車両からの遠隔監視情報と自動運転情報に基づき車両状態を認知して対応を判断、速やかにボタン操作でその判断内容を車両に伝えます。自動運転車では車両のセンサー情報と本アシスト情報の両面から、自らの自律制御判断により運行方法を決定、車両を動作させます。
遠隔アシストの導入により、現在の自動運転実証実験(レベル2)段階における同乗ドライバーの負担は大きく軽減されます。
加えて、今後のドライバー無人運行(レベル4)車両においても、その自動運転システムの機能が対応できない局面で、都度、車両に人員が駆け付けて運転操作を行う必要はなく、遠隔からのアシスト操作による走行の継続が期待されることから、事業性の向上に大きく寄与するものと考えられます。
このように、遠隔アシストに対する自動運転運営事業者のニーズはとりわけ高いものと想定され、ソリトン及びエクセイド両社は協力して、全国の事業者に対する遠隔型自動運転(遠隔アシスト)システムの展開を推進して行きます。
以下、図1~3に、遠隔アシストの構成と操作の模様を示します。
- 遠隔型自動運転システム:自動運転技術を用いて自動車を自律的に走行させるシステムで、遠隔に存する監視・操作者が電気通信技術を利用して当該自動車の運転操作を行うことのできるもの(警察庁:令和6年9月)。
今回実証の遠隔アシストは遠隔型自動運転システムの付加システムとしての位置付けであり、実証実験では従来型の全走行ユースケース対応タイプの遠隔型自動運転システムが、全体システムのベースとして設置される。 - ADENU(Autonomous Drive Enabler by Nagoya University):名古屋大学が開発し、エクセイドが提供する自動運転車用のソフトウェアパッケージ
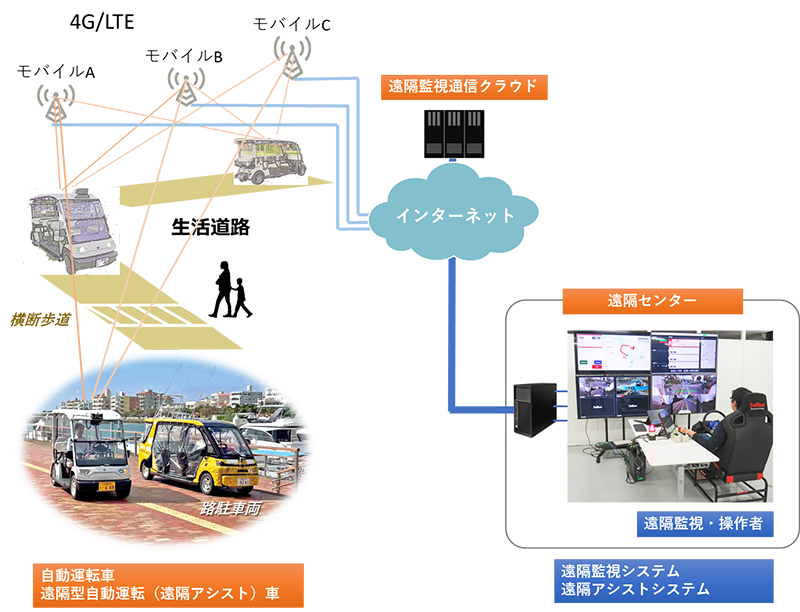
図1.遠隔型自動運転(遠隔アシスト)システム
(遠隔アシストは遠隔型自動運転システムの一部を構成)
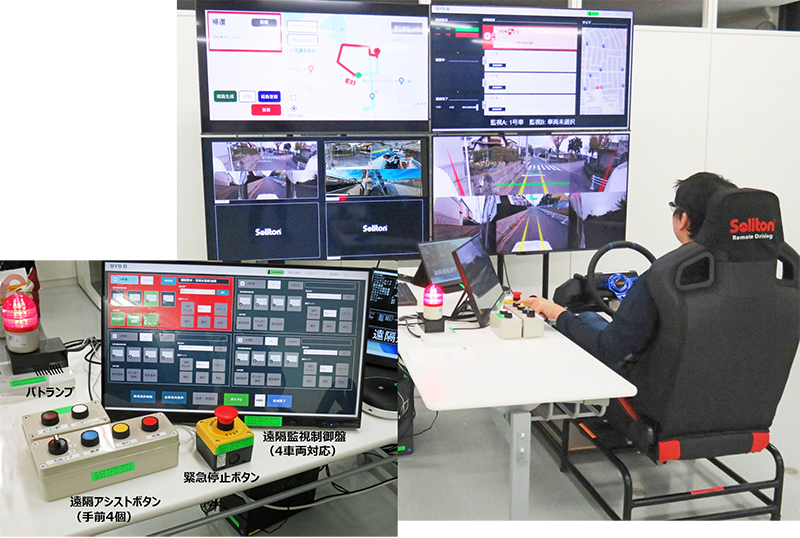
図2.遠隔アシスト用操作ボタン(左4個のボタン)
及びセンターにおける操作模様
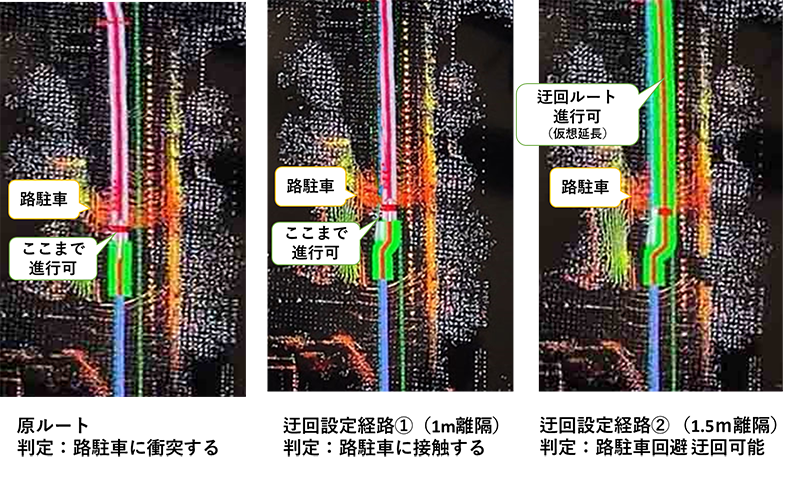
図3.路上駐車車両迂回追い越し可能経路の遠隔アシスト判定画面